Helloworld¶
The typical Kubric workflow involves a worker file, that describes the scene and how to render it. Let us go through examples/helloworld.py line by line (full source at the bottom of this page).
First, we need to create a (default) scene and attach the renderer (Blender) to it.
scene = kb.Scene(resolution=(256, 256))
renderer = KubricRenderer(scene)
Next we will create a floor (i.e. cube), and add a sphere on top of it (with default materials).
scene += kb.Cube(scale=(10, 10, 0.1), position=(0, 0, -0.1))
scene += kb.Sphere(scale=1, position=(0, 0, 1.))
We also add a directional light to illuminate the scene, and a camera for rendering:
scene += kb.DirectionalLight(position=(-1, -0.5, 3), look_at=(0, 0, 0), intensity=1.5)
scene += kb.PerspectiveCamera(position=(2, -0.5, 4), look_at=(0, 0, 1))
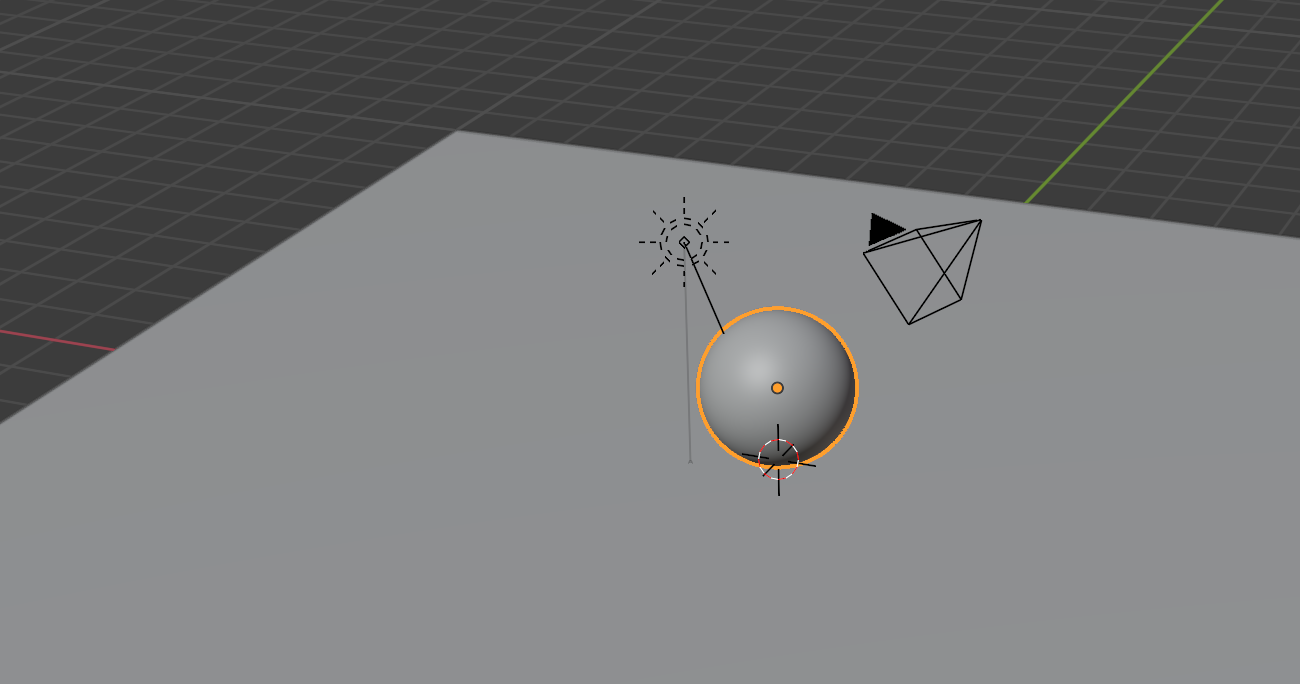
We can export this scene as a Blender file to see what is happening (you will be able to open the blend file in Blender and inspect it as visualized in the screenshot below):
renderer.save_state("helloworld.blend")
Or ask Blender to render an image (from the given camera):
layers = renderer.render_still()
The result is a dictionary of numpy arrays, each containing one layer of information exported by kubric. The relevant layers for now are:
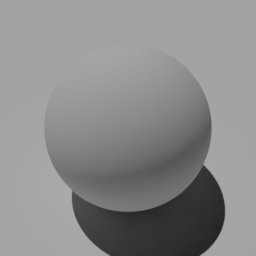
the image (
layers["rgba"])the corresponding depth map (
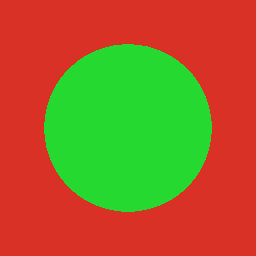
layers["depth"])the (instance) segmentation map (
layers["segmentation"])
We can save these array as PNG images using:
kb.write_png(frame["rgba"], "output/helloworld.png")
kb.write_palette_png(frame["segmentation"], "output/helloworld_segmentation.png")
scale = kb.write_scaled_png(frame["depth"], "output/helloworld_depth.png")
logging.info("Depth scale: %s", scale)
where the first line saves the RGBA image as a regular PNG, the second one saves the segmentation as a grayscale PNG but with an associated palette that makes it easier to visually see the segments, and the third line stores the depth map as a 16bit PNG after rescaling the values. This is necessary to accommodate the float32 depth values.

1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 | import logging
import kubric as kb
from kubric.renderer.blender import Blender as KubricRenderer
logging.basicConfig(level="INFO")
# --- create scene and attach a renderer to it
scene = kb.Scene(resolution=(256, 256))
renderer = KubricRenderer(scene)
# --- populate the scene with objects, lights, cameras
scene += kb.Cube(name="floor", scale=(10, 10, 0.1), position=(0, 0, -0.1))
scene += kb.Sphere(name="ball", scale=1, position=(0, 0, 1.))
scene += kb.DirectionalLight(name="sun", position=(-1, -0.5, 3),
look_at=(0, 0, 0), intensity=1.5)
scene += kb.PerspectiveCamera(name="camera", position=(3, -1, 4),
look_at=(0, 0, 1))
# --- render (and save the blender file)
renderer.save_state("output/helloworld.blend")
frame = renderer.render_still()
# --- save the output as pngs
kb.write_png(frame["rgba"], "output/helloworld.png")
kb.write_palette_png(frame["segmentation"], "output/helloworld_segmentation.png")
scale = kb.write_scaled_png(frame["depth"], "output/helloworld_depth.png")
logging.info("Depth scale: %s", scale)
|